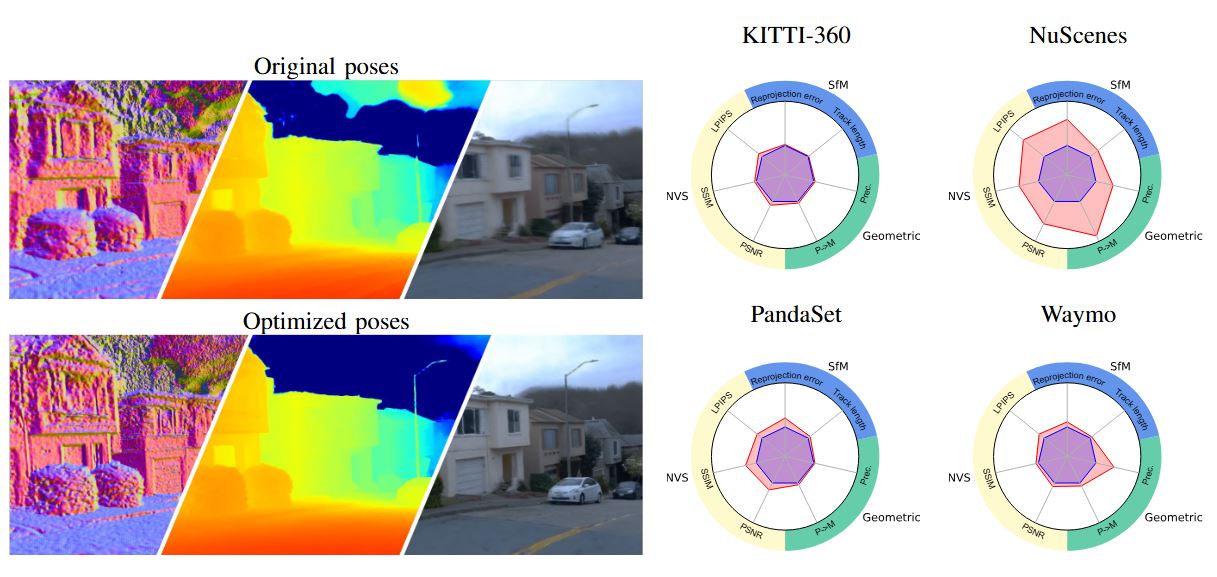
Dataset pose improvement: Left, rendering comparison between original poses and optimized poses on Waymo open dataset (from left to right: normal map, depth map and RGB rendering). Right, the changes in metrics between the original poses (in blue) and the poses optimized with MOISST (in red) for each dataset, grouped in 3 categories: NVS, SfM, Geometric.







